حرکت استیک کنترل از راه دور ← کنترل کننده مرکزی پرواز ← مدارهای کنترل الکترونیکی سرعت (ESC) ← موتورها و پروانه ها ← حرکت یا شناور کوادکوپتر.
چگونه یک کوادکوپتر همراه با ملخ ها و موتورها کار می کند
تاریخ ایجاد: 23ام خرداد
درک جهت موتور و پروانه هواپیمای بدون سرنشین به همراه طراحی به ما نشان می دهد که یک کوادکوپتر چگونه کار می کند.
امروزه کوادکوپترها به راحتی در هر جهتی پرواز می کنند. آنها همچنین می توانند به آرامی در جای خود شناور شوند. مهندسی و طراحی با هواپیما یا هلیکوپتر برای پرواز متفاوت است.
بنابراین چگونه یک کوادکوپتر شناور می شود یا در هر جهتی پرواز می کند، با یک لحظه لمس کنترل از راه دور، بلند می شود یا پایین می آید. پهپادها همچنین میتوانند از طریق نرمافزار ناوبری برنامهریزیشده ایستگاه بینالمللی به صورت مستقل پرواز کنند و در هر جهتی که از نقطهای به نقطه دیگر حرکت میکنند، پرواز کنند. بنابراین بیایید به فناوری کوادکوپتر نگاه کنیم که این امکان را فراهم می کند.
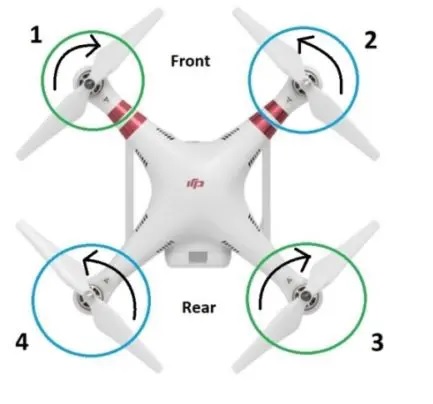
این جهت پروانه همراه با چرخش موتور و سرعت پهپاد است که پرواز و قابلیت مانور آن را ممکن می کند.
کنترلر پرواز کوادکوپتر اطلاعات را از طریق مدارهای الکترونیکی کنترل سرعت (ESC) در مورد رانش، RPM، (دور در دقیقه) و جهت به موتورها ارسال می کند. کنترلر پرواز همچنین داده های IMU، Gyro و GPS را قبل از سیگنال دادن به موتورهای کوادکوپتر در مورد رانش و سرعت روتور ترکیب می کند.
در حالی که فناوری پهپادها و کوادکوپترهای امروزی کاملاً مدرن هستند، آنها هنوز از اصول قدیمی پرواز هواپیما، گرانش، جفت عمل و واکنش استفاده می کنند .
در ساخت کوادکوپترها، پروانه ها و طراحی موتور، 4 نیرویی که بر تمام پروازها تأثیر می گذارد ( وزن، بالابر، رانش و درگ ) نیز ملاحظات مهمی هستند.
ریاضیات همچنین برای محاسبه نیروی رانش موتور کوادکوپتر استفاده می شود در حالی که آیرودینامیک هواپیما برای طراحی پروانه و حرکت هوا در بالا، پایین و اطراف کوادکوپتر استفاده می شود.
اهمیت نحوه کار و پرواز یک کوادکوپتر
با کمی تجربه، پرواز با کوادکوپتر خودکار می شود. شما میله ها را روی ایستگاه زمینی کنترل از راه دور حرکت می دهید که کوادکوپتر را به هر سمتی که می خواهید پرواز می کند. نیازی نیست به این فکر کنیم که موتورها یا پروانه ها چه می کنند.
حالا فرض کنید کوادکوپتر شما به درستی پرواز نمی کرد. ممکن است در یک جهت کشیده شود یا به آرامی معلق نباشد. خوب، درک نحوه عملکرد کوادکوپتر و پرواز به شما کمک می کند تا مشکل موتور یا پروانه را پیدا کنید، به خصوص اگر بازرسی بصری ایرادی را نشان ندهد.
هنگامی که طراحی پروانه کوادکوپتر و رانش موتور را درک کردید، می توانید تغییراتی در کوادکوپتر خود ایجاد کنید، مانند برداشتن دوربین و نصب محموله دیگری مانند Time-of-Flight یا سنسور Lidar .
پرواز با محموله متفاوت بر روی کنترل، پرواز و تعادل پهپاد تاثیر خواهد داشت. سپس یک محموله متفاوت به رانش موتور کوادکوپتر متفاوتی نیاز دارد.
اگر کوادکوپترهای خود را می سازید یا طراحی می کنید، درک طراحی موتور و پروانه اطلاعات ضروری است. شما به پیکربندی صحیح موتور کوادکوپتر، ملخ های منطبق، مدارهای الکترونیکی کنترل سرعت به همراه IMU و GPS به همراه تطبیق بدنه صحیح نیاز دارید.
اگر میخواهید در مورد سایر اجزای سازنده پهپاد معمولی ما بیشتر بدانید، این مقاله فوقالعاده در مورد انواع فناوری پهپاد را بخوانید .
خوب، اجازه دهید اکنون به نحوه پرواز پهپاد و به طور خاص پروانه کوادکوپتر و جهت و طراحی موتور نگاه کنیم.
جهت موتور و پروانه کوادکوپتر توضیح داده شده است
چگونه یک کوادکوپتر پرواز می کند
اساساً حرکت روی کنترل از راه دور، سیگنال هایی را به کنترل کننده مرکزی پرواز می فرستد. این فلایت کنترل مرکزی این اطلاعات را به کنترل کننده های سرعت الکترونیکی (ESC) هر موتور می فرستد که به نوبه خود موتورهای آن را برای افزایش یا کاهش سرعت هدایت می کند.
کنترلر مرکزی پرواز
اکنون کنترلر مرکزی پرواز نیز اطلاعات را از IMU، ژیروسکوپ، ماژول های GPS و سنسورهای تشخیص موانع در صورت وجود کوادکوپتر می گیرد. محاسبات محاسباتی را با استفاده از پارامترها و الگوریتم های پرواز برنامه ریزی شده انجام می دهد، سپس این داده ها را به کنترل کننده های سرعت الکترونیکی ارسال می کند.
در واقع، اکثر فلایت کنترلها دارای IMU، GPS، ژیروسکوپ و بسیاری از ویژگیهای دیگر برای کنترل پرواز و پایداری کوادکوپتر هستند. اغلب، آنها دارای IMU دوگانه برای افزونگی و سایر ویژگی های ایمنی، مانند بازگشت به خانه هستند.
اکنون کنترلر مرکزی پرواز نیز اطلاعات را از IMU، ژیروسکوپ، ماژول های GPS و سنسورهای تشخیص موانع در صورت وجود کوادکوپتر می گیرد. محاسبات محاسباتی را با استفاده از پارامترها و الگوریتم های پرواز برنامه ریزی شده انجام می دهد، سپس این داده ها را به کنترل کننده های سرعت الکترونیکی ارسال می کند.
در واقع، اکثر فلایت کنترلها دارای IMU، GPS، ژیروسکوپ و بسیاری از ویژگیهای دیگر برای کنترل پرواز و پایداری کوادکوپتر هستند. اغلب، آنها دارای IMU دوگانه برای افزونگی و سایر ویژگی های ایمنی، مانند بازگشت به خانه هستند.

